





Các yêu cầu về phần cơ cấu khởi động của rô bốt được quy định như thế nào? Hệ thống điều khiển liên quan đến an toàn của rô bốt có những đặc tính gì?
Các yêu cầu về phần cơ cấu khởi động của rô bốt được quy định như thế nào?
Theo tiểu mục 5.3 Mục 5 Tiêu chuẩn quốc gia TCVN 13229-1:2020 (ISO 10218-1:2011) về Rô bốt và các bộ phận cấu thành rô bốt - Yêu cầu an toàn cho rô bốt công nghiệp - Phần 1: Rô bốt có quy định về cơ cấu khởi động của rô bốt như sau:
"5.3 Cơ cấu khởi động
5.3.1 Yêu cầu chung
Các cơ cấu khởi động khởi tạo năng lượng hoặc chuyển động phải được thiết kế và cấu tạo để đáp ứng các tiêu chí đặc tính được nêu trong 5.3.2 đến 5.3.5.
5.3.2 Bảo vệ chống vận hành không có chủ định
Các cơ cấu khởi động phải được thiết kế hoặc định vị sao cho ngăn ngừa được sự vận hành không có chủ định. Ví dụ, có thể sử dụng các nút ấn hoặc công tắc chuyển mạch chính được thiết kế ở các vị trí thích hợp.
5.3.3 Chỉ báo trạng thái
Trạng thái của các cơ cấu khởi động phải được chỉ báo rõ ràng ví dụ bật năng lượng, phát hiện lỗi, vận hành tự động.
Nếu sử dụng một dụng cụ chỉ báo bằng ánh sáng thì vị trí lắp đặt dụng cụ phải thích hợp và màu sắc của ánh sáng phải đáp ứng các yêu cầu của TCVN 12669-1 (IEC 60204-1).
5.3.4 Ghi nhãn
Các cơ cấu khởi động phải được ghi nhãn để chỉ báo rõ ràng chức năng của chúng.
5.3.5 Điểm điều khiển duy nhất
Hệ thống điều khiển rô bốt phải được thiết kế và cấu tạo sao cho khi rô bốt được đặt dưới sự điều khiển tại chỗ bằng giá treo hoặc điều khiển bằng cơ cấu dạy học khác thì sự khởi tạo chuyển động của rô bốt hoặc thay đổi lựa chọn điều khiển tại chỗ từ bất cứ nguồn nào khác phải được ngăn chặn."
Các yêu cầu về phần cơ cấu khởi động của rô bốt được quy định như thế nào? (Hình từ Internet)
Hệ thống điều khiển liên quan đến an toàn của rô bốt có những đặc tính gì?
Theo tiểu mục 5.4 Mục 5 Tiêu chuẩn quốc gia TCVN 13229-1:2020 (ISO 10218-1:2011) về Rô bốt và các bộ phận cấu thành rô bốt - Yêu cầu an toàn cho rô bốt công nghiệp - Phần 1: Rô bốt, các quy định liên quan đến đặc tính hệ thống được quy định cụ thể như sau:
"5.4 Đặc tính của hệ thống điều khiển liên quan đến an toàn (phần cứng/ phần mềm)
5.4.1 Yêu cầu chung
Các hệ thống điều khiển liên quan đến an toàn (điện, thủy lực, khí nén và phần mềm) phải tuân theo 5.4.2 trừ khi các kết quả của đánh giá rủi ro xác định bằng một tiêu chí đặc tính khác như đã mô tả trong 5.4.3 là thích hợp. Đặc tính của hệ thống điều khiển liên quan đến an toàn của rô bốt và bất cứ thiết bị nào được cung cấp phải được công bố rõ ràng trong thông tin sử dụng.
CHÚ THÍCH 1 Các hệ thống điều khiển liên quan đến an toàn cũng có thể được gọi là SRP/CS (các chi tiết liên quan đến an toàn của các hệ thống điều khiển).
Theo tiêu chuẩn này đặc tính của hệ thống điều khiển liên quan đến an toàn được công bố là:
- Các mức (PL) và loại đặc tính như đã mô tả trong TCVN 7384 -1 (ISO 13849-1), 4.5.1;
- Các mức về tính toàn diện của an toàn (SIL) và các yêu cầu về dung sai lỗi của phần cứng như đã mô tả trong IEC 62061:2005, 5.2.4.
Hai tiêu chuẩn trên đề cập đến an toàn chức năng khi sử dụng các phương pháp tương tự nhưng khác nhau. Nên sử dụng các yêu cầu trong hai tiêu chuẩn trên cho các hệ thống điều khiển liên quan đến an toàn riêng có dự định sử dụng các yêu cầu này. Người thiết kế có thể lựa chọn sử dụng một trong hai tiêu chuẩn. Các dữ liệu và tiêu chí cần thiết để xác định đặc tính của hệ thống điều khiển liên quan đến an toàn phải được đưa vào thông tin sử dụng.
CHÚ THÍCH 2 Sự so sánh với TCVN 7384-1 (ISO 13849-1) và IEC 62061 được mô tả trong ISO/TR 23849.
Cũng có thể sử dụng các tiêu chuẩn khác đưa ra các yêu cầu đặc tính khác như thuật ngữ “độ tin cậy điều khiển” đang được sử dụng ở Bắc Mỹ. Khi sử dụng các tiêu chuẩn khác này để thiết kế các hệ thống điều khiển liên quan đến an toàn thì phải đạt được một mức giảm rủi ro tương đương.
Bất cứ hư hỏng nào của hệ điều khiển liên quan đến an toàn phải dẫn đến loại dừng 0 hoặc 1 phù hợp với TCVN 12669-1 (IEC 60204-1).
5.4.2 Yêu cầu đặc tính
Các chi tiết liên quan đến an toàn của các hệ thống điều khiển phải được thiết kế sao cho chúng tuân theo PL=d với loại kết cấu 3 như đã mô tả trong TCVN 7384 -1 (ISO 13849-1) hoặc tuân theo SIL 2 với dung sai lỗi phần cứng 1 và với khoảng thời gian thử kiểm tra xác nhận không ít hơn 20 năm như đã mô tả trong IEC 62061:2005.
Các yêu cầu trên có ý nghĩa cụ thể:
a) Một lỗi đơn trong bất cứ các chi tiết đã nêu trên nào cũng không dẫn tới làm mất chức năng an toàn;
b) Mỗi khi có thể thực hiện được một các hợp lý, lỗi đơn phải được phát hiện ngay tại lúc hoặc trước khi có yêu cầu tiếp sau đối với chức năng an toàn;
c) Khi xuất hiện lỗi đơn, chức năng an toàn luôn luôn được thực hiện và phải duy trì một trạng thái an toàn tới khi lỗi đã phát hiện được sửa chữa; và
d) Tất cả các lỗi hợp lý thấy trước được phải được phát hiện.
Các yêu cầu a) đến d) được xem là tương đương với loại kết cấu 3 như đã mô tả trong TCVN 7384 -1 (ISO 13849-1).
CHÚ THÍCH Yêu cầu của sự phát hiện ra lỗi đơn không có nghĩa là tất cả các lỗi sẽ được phát hiện. Hậu quả là sự tích tụ của các lỗi không được phát hiện có thể dẫn đến một tín hiệu ra không theo dự định và một tình huống nguy hiểm ở tại máy.
5.4.3 Các tiêu chí đặc tính của hệ thống điều khiển khác
Các kết quả của đánh giá rủi ro toàn diện được thực hiện trên hệ thống rô bốt và ứng dụng theo dự định của sự đánh giá này có thể xác định bằng một đặc tính của hệ thống điều khiển liên quan đến an toàn khác với đặc tính đã được trình bày trong 5.4.2 được đảm bảo cho ứng dụng.
Việc lựa chọn một trong các tiêu chí đặc tính của hệ thống điều khiển liên quan đến an toàn này phải được nhận biết riêng và các giới hạn thích hợp cũng như các cảnh báo phải được bao gồm trong thông tin sử dụng đã cung cấp cùng với thiết bị."
Chức năng dừng của rô bốt được sử dụng như thế nào?
Tại tiểu mục 5.5 Mục 5 Tiêu chuẩn quốc gia TCVN 13229-1:2020 (ISO 10218-1:2011) về Rô bốt và các bộ phận cấu thành rô bốt - Yêu cầu an toàn cho rô bốt công nghiệp - Phần 1: Rô bốt có quy định về chức năng dừng của rô bốt như sau:
"5.5 Chức năng dừng của rô bốt
5.5.1 Yêu cầu chung
Mỗi rô bốt phải có một chức năng dừng bảo vệ và một chức năng dừng khẩn cấp độc lập. Các chức năng này phải cung cấp phương tiện để kết nối các thiết bị bảo vệ bên ngoài. Một tín hiệu ra dừng khẩn cấp có thể được cung cấp theo tùy chọn. Bảng 1 giới thiệu sự so sánh của chức năng dừng khẩn cấp và chức năng dừng bảo vệ.
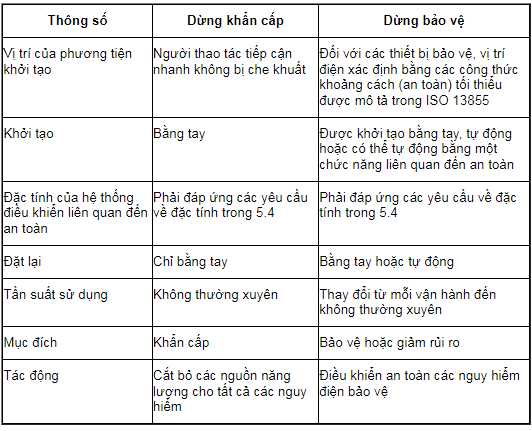
Bảng 1: So sánh giữa dừng khẩn cấp và dừng bảo vệ
5.5.2 Dừng khẩn cấp
Rô bốt phải có một hoặc nhiều chứa năng dừng khẩn cấp (loại dừng 0 hoặc 1 phù hợp TCVN 12669-1 (IEC 60204-1)).
Mỗi trạm điều khiển có khả năng khởi tạo chuyển động của rô bốt hoặc các tình huống nguy hiểm khác phải có một chức năng dừng khẩn cấp được khởi tạo bằng tay:
a) Tuân theo các yêu cầu của 5.4 và TCVN 12669-1 (IEC 60204-1);
b) Được ưu tiên sử dụng trước tất cả các chức năng điều khiển khác của rô bốt;
c) Làm cho tất cả các nguy hiểm có kiểm soát dừng lại;
d) Ngắt năng lượng dẫn động khỏi các cơ cấu khởi động rô bốt;
e) Cung cấp khả năng kiểm soát các nguy hiểm được điều khiển bởi hệ thống rô bốt;
f) Vẫn hoạt động tới khi được đặt lại; và
g) Chỉ được đặt lại bằng tác động bằng tay không gây ra khởi động lại sau khi đặt lại nhưng phải cho phép có khởi động lại.
Việc lựa chọn chức năng dừng loại 0 hoặc loại 1 (phù hợp với TCVN 12669-1 (IEC 60204-1)) phải được xác định từ đánh giá rủi ro.
Khi cung cấp một tín hiệu ra dừng khẩn cấp thì:
- Tín hiệu ra phải tiếp tục vận hành khi ngắt năng lượng của rô bốt; hoặc
- Tín hiệu ra không tiếp tục vận hành khi nguồn năng lượng cho rô bốt bị ngắt, một tín hiệu dừng khẩn cấp phải được phát ra.
Thiết bị dừng khẩn cấp phải phù hợp với TCVN 12669-1 (IEC 60204-1) và TCVN 6719 (ISO 13850).
5.5.3 Dừng bảo vệ
Rô bốt phải có một hoặc nhiều chức năng dừng khẩn cấp được thiết kế để kết nối các thiết bị bảo vệ bên ngoài. Đặc tính của chức năng dừng bảo vệ phải tuân theo các yêu cầu của 5.4.
Chức năng dừng này phải dừng tất cả các chuyển động của rô bốt, ngắt hoặc kiểm soát năng lượng cho các cơ cấu khởi động truyền động, và cho phép kiểm soát bất cứ các nguy hiểm nào do rô bốt điều khiển. Chức năng dừng này có thể được khởi tạo bằng tay hoặc bằng điều khiển lô gíc.
Tối thiểu phải có một chức năng dừng bảo vệ là loại 0 hoặc loại 1 như đã mô tả trong TCVN 12669-1 (IEC 60204-1). Rô bốt có thể có một chức năng dừng bảo vệ bổ sung khi sử dụng loại 2 như đã mô tả trong TCVN 12669-1 (IEC 60204-1), chức năng này không dẫn đến ngắt năng lượng nhưng không yêu cầu phàm giám sát trạng thái đứng yên sau khi rô bốt dừng lại. Bất cứ chuyển động không có chủ định nào của rô bốt trong trạng thái đứng yên có giám sát hoặc hư hỏng được phát hiện của chức năng dừng bảo vệ phải dẫn đến loại dừng 0 phù hợp với TCVN 12669-1 (IEC 60204-1). Đặc tính của chức năng đứng yên có giám sát phải tuân theo 5.4. Chức năng này có thể được khởi tạo từ các thiết bị bên ngoài (tín hiệu vào dừng từ các thiết bị bảo vệ).
CHÚ THÍCH Một chức năng dừng loại 2 có giám sát phù hợp với TCVN 12669-1 (IEC 60204-1) có thể được cung cấp bởi một hệ thống dẫn động điện tương đương với một chức năng dừng vận hành an toàn (SOS) phù hợp với IEC 61800-5-2.
Nhà sản xuất phải đưa loại dừng của mỗi tín hiệu vào mạch dừng bảo vệ vào thông tin sử dụng."


Quý khách cần hỏi thêm thông tin về có thể đặt câu hỏi tại đây.
- TEMIS đánh giá chuẩn nghề nghiệp giáo viên năm 2025? Hướng dẫn tự đánh giá TEMIS chuẩn nghề nghiệp giáo viên 2025?
- Giá vé máy bay ngày 2 9 đi Hà Nội có tăng không? Giá vé máy bay nội địa do ai quyết định theo quy định hiện nay?
- Thứ tự 12 con giáp may mắn trong năm nay theo tử vi? Xem tử vi có phải là một hoạt động tín ngưỡng?
- Sắp có quy định thay thế Quy định 232 thi hành Điều lệ Đảng đúng không? Tuổi đời của người vào Đảng là bao nhiêu?
- Iphone 17 air khi nào ra mắt? Iphone 17 Pro Max khi nào ra mắt? Hình ảnh Iphone 17 dự kiến như thế nào?